
SM Servo Hemming System
1 개발 배경
자동차 차체 생산 공정의 헤밍 공법은 그 동원력으로 대부분 유압을 사용해오고 있으나, 최근 친환경 정책에 따라 점차 유압원을 배제하는 방향으로 진행되고 있습니다. 이에 자동차 메이저 회사들은 협력업체를 중심으로 로봇을 이용한 롤러 헤밍과 모터를 이용한 전동 헤밍에 대해 중점으로 개발하고 있는 추세입니다.
그러나 로봇을 이용한 롤러 헤밍의 경우 공정 시간이 지나치게 길어서 대량 생산 라인에 적용하기에는 적합하지 않고, 또한 로봇의 조작 기술에 따라서 품질의 산포가 발생 할 가능성이 있으며, 일정한 품질을 유지하기 위하여 주기적으로 검·교정 과정이 필요한 것도 약점으로 지적되고 있습니다. 이러한 문제점을 보완하기 위한 한 방법으로 당사에서는 서보 모터를 이용한 헤밍 시스템을 개발하였습니다.
2 SM Servo Hemming System 사양
| SINGLE | DOUBLE | |
| Size(mm) | 730*690*740 | 944*680*676 |
| Force(kgf) | 15,000 | 25,000 |
| Part Loading/Unloading 제외 | 14 | 14 |
3 SM Servo Hemming System 특장점
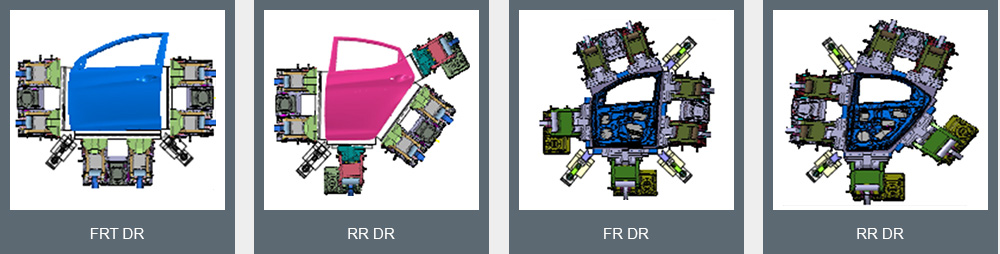
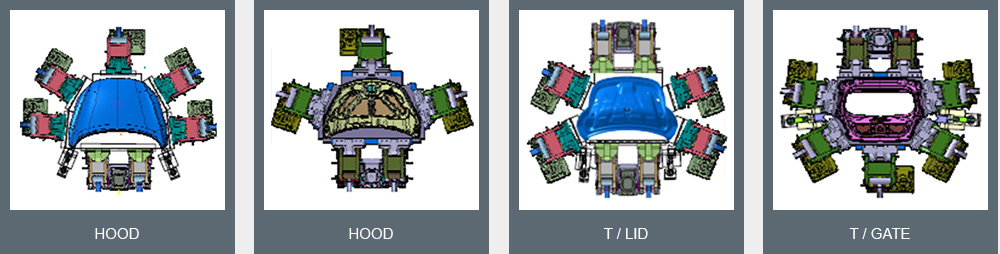
4 Hemming Punch Unit 사례
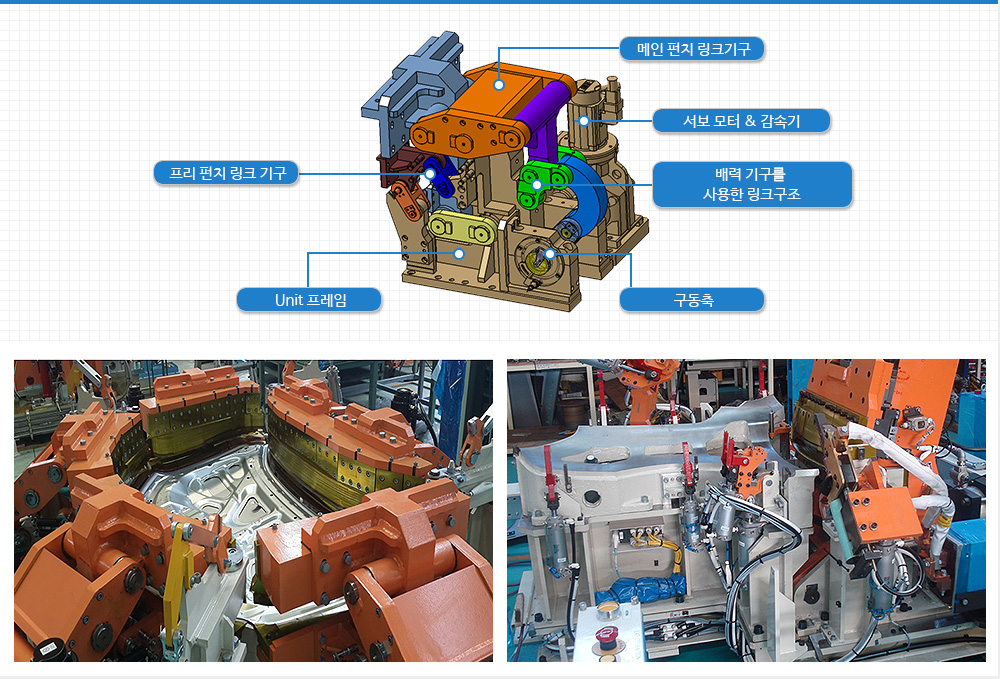
5 SM Servo Hemming 구조
본사 : 울산광역시 북구 매곡산업3길 9 (44222)
경인사업부 :경기도 시흥시 서해안로 242 시화하이테크지식산업센터5층 업무 3호
중국심양공장 : No.252,Lianhe Road, Datong Dist Shenyang, China
Tel : 052-298-2311~5(Fax : 2316) | E-Mail : sm.u@sammico.com
Copyright(c) 2015 SAMMI All Rights Reserved.
